
Focusproject Griffin
Our journey developing an innovative flying manipulator
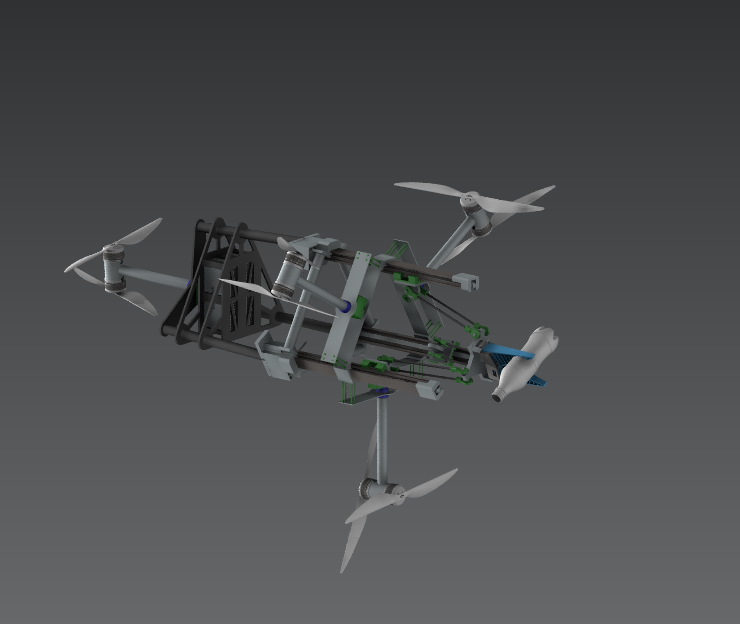
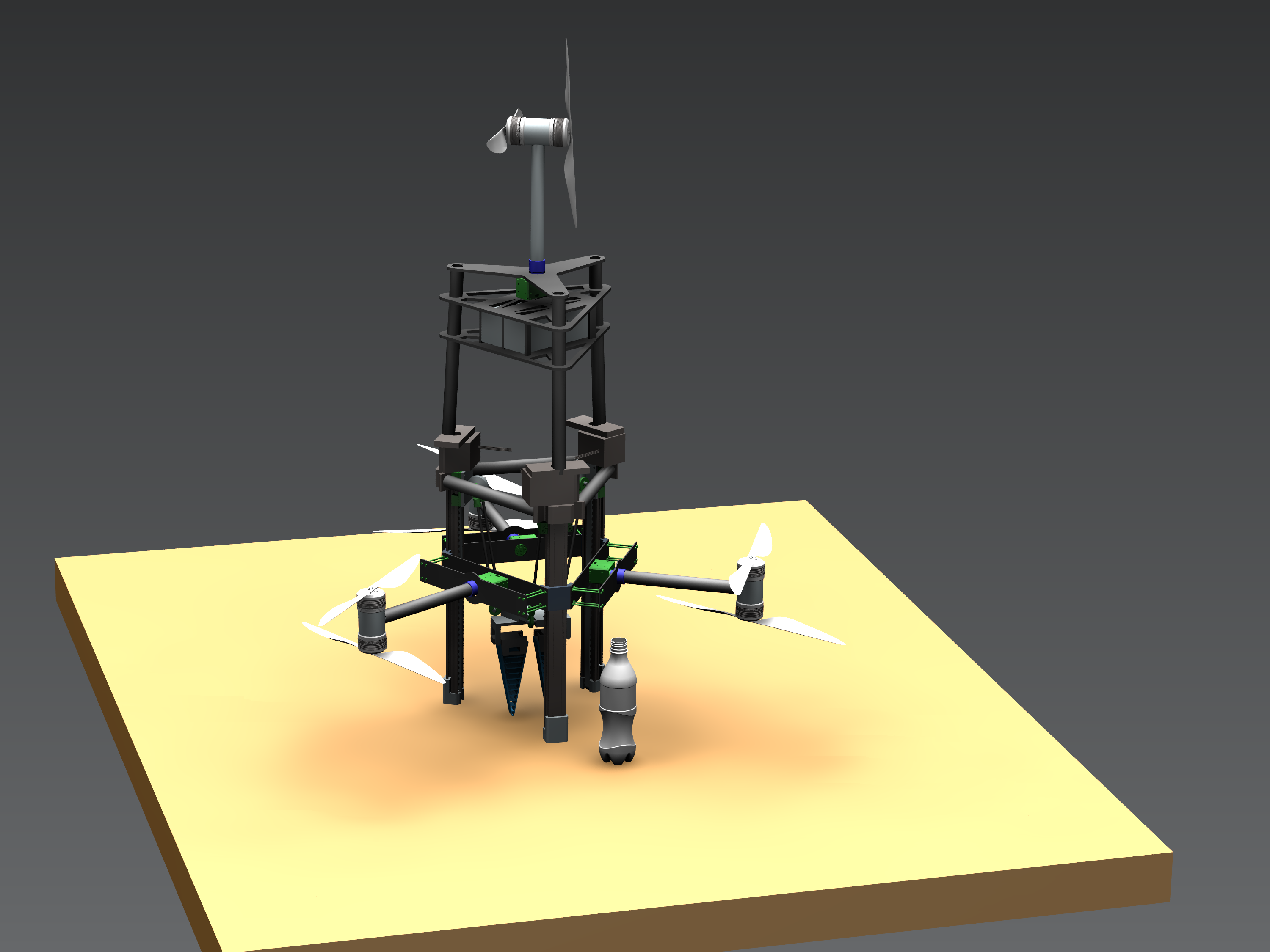
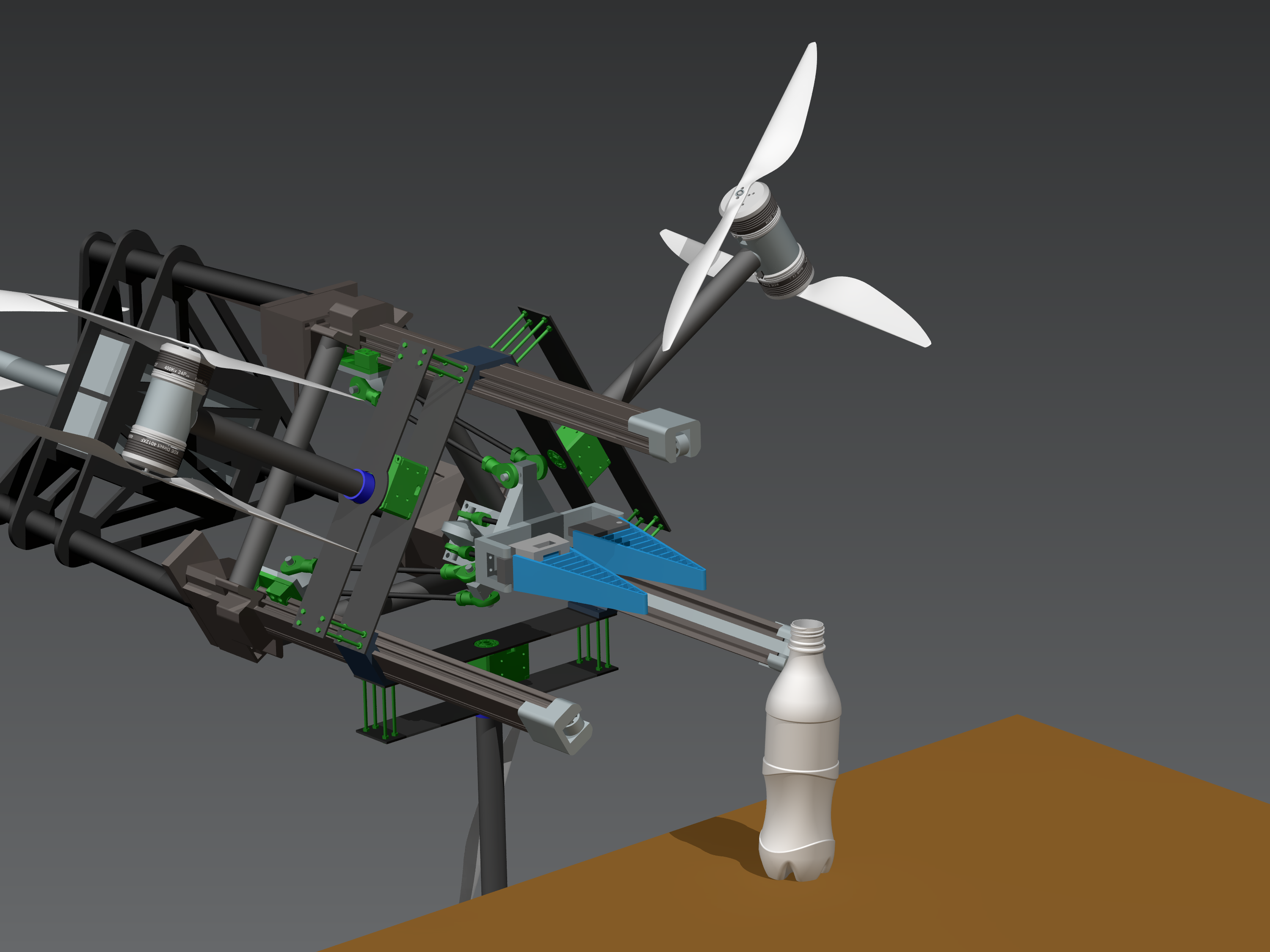
Below, you can see the 3D Model of our system. Scroll to zoom in and drag the model to rotate it. You can also pan the view by holding shift and dragging the model
Project Timeline
03.06.2021 - Full Horizontal Mission
To prove that PrisMAV is capable of manipulating objects from any pose, a mission in the so-called horizontal mode was carried out. In this video, it can be seen how PrisMAV grasps an object from a shelf and places it into a cylinder. PrisMAV's omnidirectional flying capabilities allow the object to be grasped from the side which is of advantage when interaction at a shelf takes place.
29.05.2021 - Full Tricopter Mission
After successfully grasping an object, the first mission of PrisMAV was executed in what we refer to as the tricopter mode. PrisMAV flew to a predefined location, grasped a cylinder and dropped it into a bin. As can be seen in the video, PrisMAV can precisely grasp and place an object in a new location.
28.05.2021 - Aerial Manipulation
Finally, we were able to conduct aerial manipulation! PrisMAV successfully grasped a cylinder and placed. The robot arm was able to precisely compensate the error of the flying platform. This made it possible to place the cylinder back at its original position.
20.05.2021 - PrisMAV is here!
After a few weeks of testing and tuning the flying platform and the manipulator separately, we finally managed to execute the first combined test. The arm was able to compensate the error of the flying platform with high precision!
Nevertheless, we will have to further improve the robustness of the platform and work on the mission execution.
23.04.2021 - PrisMAV exploring new heights
After fine-tuning our controller in simulation, we finally managed to bring PrisMAV to fly stably in the tricopter mode!
To prevent PrisMAV from crashing, the drone was tethered to a rope.
After reaching this big milestone, we are working hard to get PrisMAV to fly stably omnidirectionally. This will then allow us to integrate the manipulator into the drone.
12.04.2021 - First Flight Test
Check out our first flight test!
The story is definitely to be continued ...
29.03.2021 - Manipulator: First Test
While preparing for first flight tests, we have the time to take a closer look at our manipulator.
To be able to test the flying platform and manipulator simultaneously, a arm testbench was built. The arm testbench had the exact same prismatic structure as in the real system. The video shows the testbench in action.
The first test went quite well. Nevertheless, there is still a lot of controller tuning required to achieve a high precision at the gripper.
20.03.2021 - Flight Simulation
We are currently developing the flight controller for our flying platform. As you can see in the simulation, the flight controller is already on a good track.
In the next few weeks we want to test our controller on the real platform. We will see how PrisMAV will perform in real life.
Stay tuned!
11.03.2021 - Testing the Prop Groups
We assembled our tilting propeller groups, which you can see in the animation above.
These rotating propellers allow the drone to fly in every direction. This ability provides the needed agility, such that PrisMAV is able to grip objects from different poses and orientations.


22.02.2021 - Kick-Off 2nd Semester
The exam session has finished and we are back again, fully motivated for the second semester of our focusproject journey!
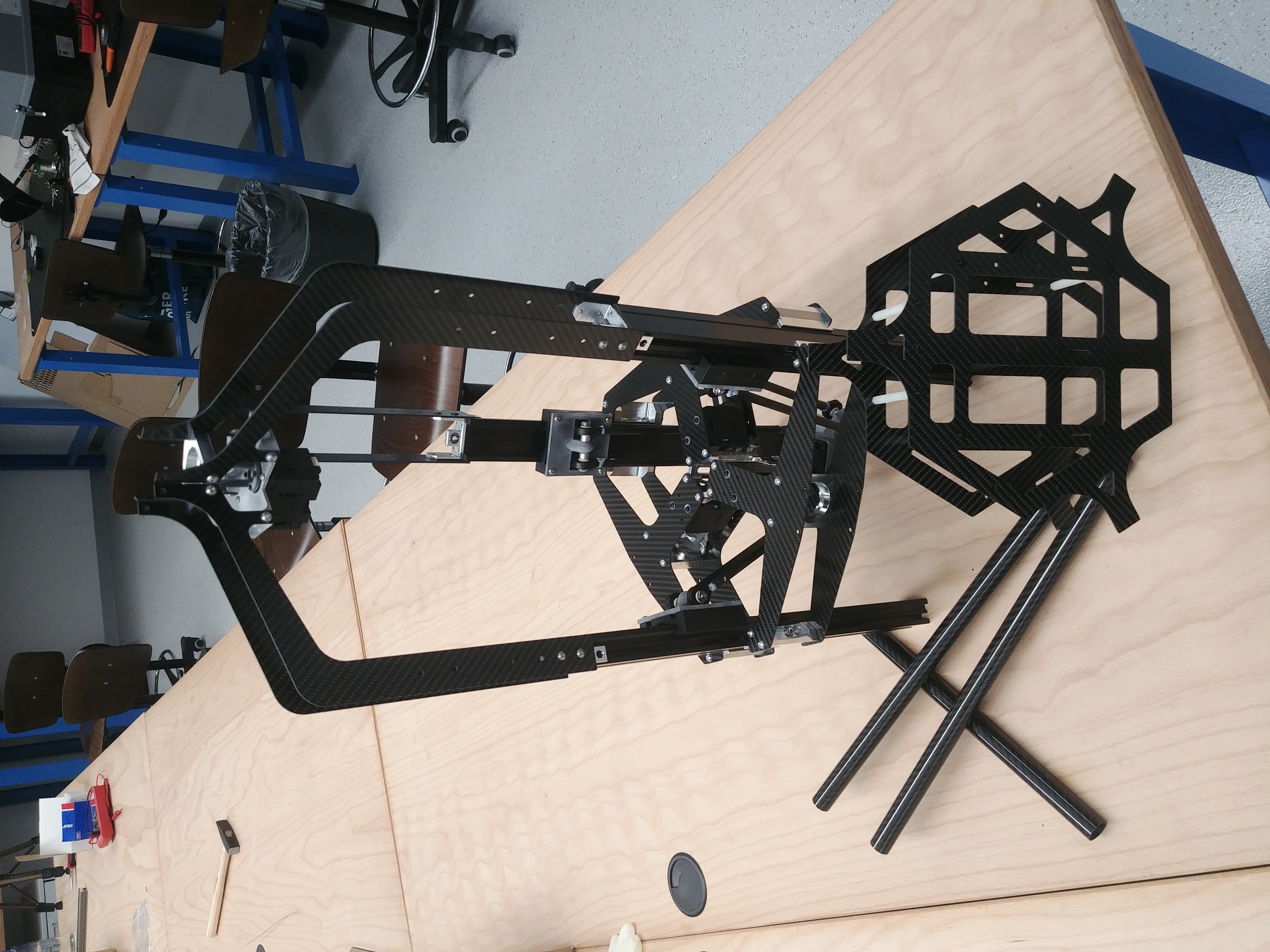
Most components have arrived and we already began to assemble the structure as you can see in the picture above.
11.12.2020 - Hardware Design



After finding a concept and defining the specific goals we want to achieve, including the tasks we want to show at the final presentation, we decided to dig deep into the design and the hardware dimensions.
For the past 3 weeks we focused on choosing the best materials and the right dimensions for each part, as well as designing the mechanisms needed for our robot.
25.09.2020 - Concept finding

We are now in the process of collecting ideas and defining our product goals we want to achieve.
Due to the coronavirus this process included many online meetings. Nevertheless, we were able to come up with numerous creative and innovative concepts.
18.09.2020 - Kick-Off

The kick-off meeting together with our coaches marked the beginning of this exciting journey.
After discussing first steps of our project, we are ready to start this challenge and push aerial manipulation to new dimensions.